
 micro:bit - SD Card File 생성 및 쓰기
micro:bit - SD Card File 생성 및 쓰기
출처 : SD Card File System - Cookbook | Mbed FATFileSystem - FATFileSystem | Mbed micro:bit - SD Card File 생성 및 쓰기 SD Card File System와 FATFileSystem 라이브러리를 사용해서 micro:bit에서 마이크로 SD에 파일 쓰기 예제를 만들어 보았습니다. Microsoft Block용 라이브러리인 pxt-microsd-microbit도 공개 되어 있으니 참고 하세요. 소스 #include "MicroBit.h" #include "SDFileSystem.h" MicroBit uBit; SDFileSystem sd(P0_21, P0_22, P0_23, P0_16, "sd"); // mosi, miso, ..
MicroBitRadioEvent.h /** * Associates the given event with the radio channel. * * Once registered, all events matching the given registration sent to this micro:bit's * default EventModel will be automatically retransmitted on the radio. * * @param id The id of the event to register. * * @param value the value of the event to register. * * @return MICROBIT_OK on success, or MICROBIT_NO_RESOURCES..
 micro:bit - ESP8266 ESP-01 Serial Wireless WIFI Module
micro:bit - ESP8266 ESP-01 Serial Wireless WIFI Module
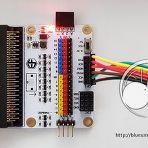
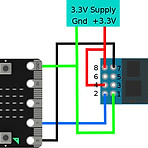
출처 : micro:bit IoT In C - Getting On WiFimicro:bit - ESP8266 ESP-01 Serial Wireless WIFI Modulemicro:bit의 한가지 아쉬운 점은 Wifi가 내장되어 있지 않아 Wifi를 따로 설치해야 되는데, 이번에 아두이노에서 많이 사용하는 Wifi 모듈인 ESP8266을 사용해서 공유기에 접속하고 간단하게 웹서비스로 온도를 제공하는 서비스를 구현했습니다. 결과는 PC 브라우져로 접속하면 결과를 확인 해볼 수 있습니다.배선핀 배열Ground - connect to ground TXO - the serial tx pin GPIO2 - ignore CHPD - chip enable connect to 3.3V GPIO0 - ignore RST..
출처 : That IoT Thing: BBC micro:bit #include "MicroBit.h" MicroBit uBit; void temperatureUpdate(MicroBitEvent) { uBit.display.scroll( uBit.thermometer.getTemperature()); } int main() { uBit.init(); uBit.display.scroll( uBit.thermometer.getTemperature()); uBit.messageBus.listen(MICROBIT_ID_THERMOMETER, MICROBIT_THERMOMETER_EVT_UPDATE, temperatureUpdate); }
출처 : GitHub - bportaluri/WiFiEsp: Arduino WiFi library for ESP8266 modules GitHub - Diaoul/arduino-ESP8266: An Arduino library to manage the ESP8266. WiFiEsp / ConnectWPA,ino 출처 : GitHub - bportaluri/WiFiEsp: Arduino WiFi library for ESP8266 modules /* WiFiEsp example: ConnectWPA This example connects to an encrypted WiFi network using an ESP8266 module. Then it prints the MAC address of the WiF..
 micro:bit - Elecfreaks Joystick:bit
micro:bit - Elecfreaks Joystick:bit
출처 : Arduino Space Invaders Part 8 - Scoring ELECFREAKS Joystick:bit for Micro:bit - ElecFreaks https://makecode.microbit.org/_M9eHWe0aMc1D micro:bit - Elecfreaks Joystick:bit JavaScript 소스 C++ 소스 #include "MicroBit.h" MicroBit uBit; // P10 = P0_6 - joystick down AnalogIn joystick_button(P0_1); AnalogIn joystick_y(P0_2); AnalogIn joystick_x(P0_3); int main() { // Initialise the micro:bit runtime..
 micro:bit - BLE - RC Car -PWM 사용
micro:bit - BLE - RC Car -PWM 사용
본 체험 제품은 element14 의 후원을 받아 아이씨뱅큐㈜ 에서 진행하는 무상 체험단 활동으로 작성한 것입니다.출처 : Motor Driver Board for the BBC micro:bit - V2 | Kitronik Blog Yamasho: Delphi 10.2.2:Bleで Microbitと通信する。 googlesamples/android-BluetoothLeGatt - GitHub ButtonService - micro:bit runtime microbit-samples/source/examples/bluetooth-services/main.cpp - GitHub https://github.com/lancaster-university/microbit-dal/issues/337 Advanced ..
- Total
- Today
- Yesterday
- android
- Linux
- koba2010
- 튜닝쇼 2008
- oracle
- Xcode
- Spring MVC
- flex
- ubuntu
- Java
- 서울오토살롱
- Delphi
- NDK
- Spring
- 일본여행
- ble
- Delphi Tip
- BPI-M4
- 지스타2007
- 레이싱모델 익스트림 포토 페스티벌
- KOBA
- ffmpeg
- JavaScript
- Mac
- 동경
- MySQL
- SAS
- sas2009
- 전예희
- 송주경
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 |